GNSS Simulator
GNSS Simulator
Simulation platform DiRKGNSS Simulator – Simulating car position anywhere in the world
The GNSS simulator provides radio signal corresponding to satellite constellation perceived at a particular spot on Earth. The receiver (such as ConMod or older communication unit) can be located in the lab and still be receiving a signal like on a place thousands kilometers away. Therefore, GNSS receiver is a simple extension of a testbench allowing testing of much wider test suite in the lab.
GNSS receiver can work standalone with manual control or as a part of a real-time testbench consuming coordinates of the simulated position and generating corresponding radio signal.
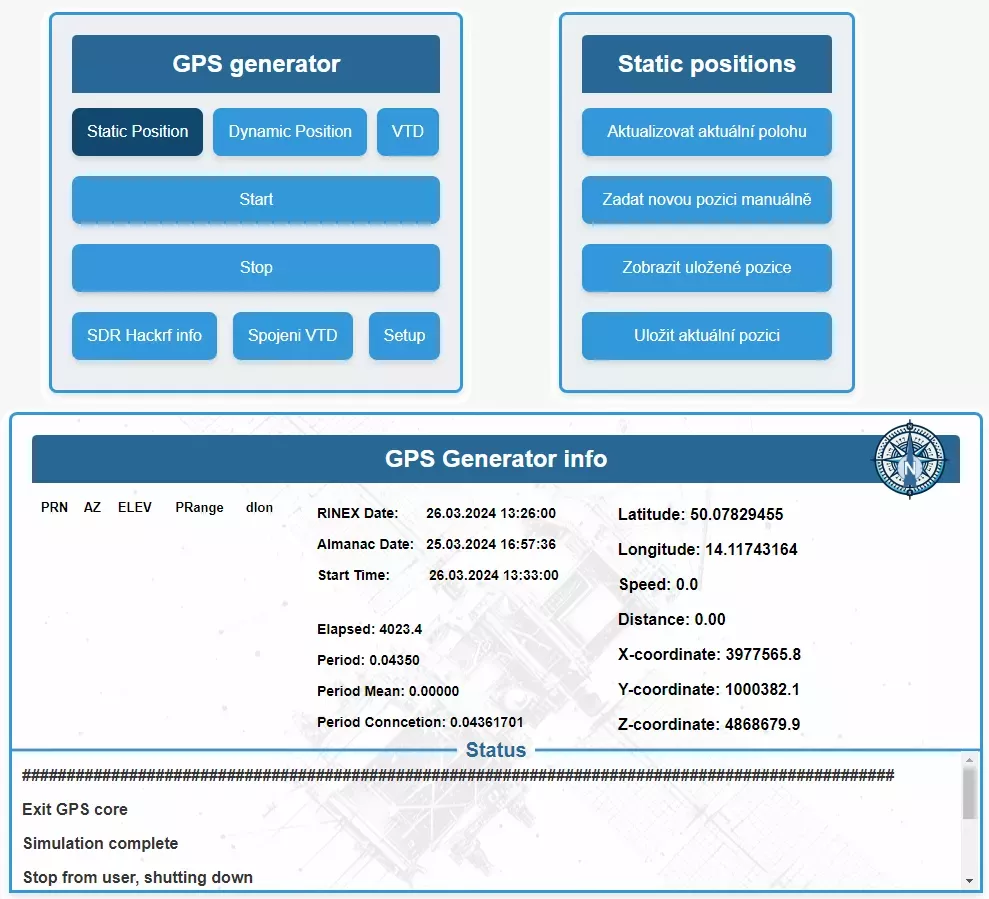
The simulator has a suitable control via web interface eliminating a need of installation of a dedicated software and making it easy to use.
The biggest benefits of GNSS simulation is saving time and resources during testing of location dependent automotive features and functions. There are obvious examples in testing Navigation and its HMI but the simulator is used frequently in testing ADAS related functions too. For example, ADAS functions have legal limitations, and thus, state borders crossing might be a trigger for switching them on and off.
In addition, functions related to eHorizon and power saving functions (ECO Assist) are dependent on vehicle location and thus easily testable with GNSS Simulator.
The Simulator is build on modern technologies and tailored for use in automotive domain. It works with L1 constellation though it can be easily extended for other according to a project need.
Key features
- Extension of real-time testbenches for positioning and navigation test cases
- Standalone lab solution (no antenna is necessary)
- Built on Linux platform with Software Defined Radio
- 25Hz position synchronization
- Enabling testing for Driver assistant functions in lab
- Controlled via Web interface and CLI for automation
- Real-time simulation of dynamic constellations
- Compatible with virtual reality (ADTF, VTD)
Technical parameters
| Supported platform | MEB, MQB, PPE 1.2 |
| Main purpose | Position-dependent static and dynamic testing |
| Connection | Rf GNSS signal |
| Power supply | 230 V |
| Dimensions (W x D x H) | 210 x 370 x 460 mm |
| Weight without accessories | 8.75 kg |